The prototype of the excavation drone (2020)
This is a prototype of the autonomous excavation drone that can return to the excavation start point after excavating the underground soil or ice sheet.
これは地中や氷床を掘削後、掘削開始地点へ帰還可能な自律掘削ドローンのプロトタイプです。
This equips both ends of the cylindrical body with drill blades that have different spiral directions, and controls the rotation direction while canceling the anti-torque.
Furthermore, it is possible to perform forward drilling or backward drilling and also sample return etc.
I’d like to utilize this excavation drone for polar ice sheet surveys, space explorations such as geological surveys of the surface of Mars, and ice sheet survey of Jupiter’s satellite Europa.
I applied for a patent in Japan.
円筒状の本体両端に、ブレードの螺旋方向が異なるドリルブレードを装備し、反トルクを相殺しながら回転方向を制御。前進掘削または後進掘削を行えて、サンプルリターンなども可能な掘削推進装置の試作になります。
この掘削ドローンは地質調査にとどまらず、極地や地球外天体、特に火星表面の地質調査や木星の衛星エウロパの氷床調査など、宇宙探査に活用できればと考えています。
本掘削推進装置は、日本国内において特許出願中です。
Movie/動画
Originally, it was the Jupiter satellite Europa ice-bottom ocean probe prototype that was produced last year. Though the previous prototype had a problem that neither the probe nor the drilling sample could be collected after the drilling, this excavation drone may be the solution.
この掘削ドローンの元になったのは、昨年制作していたエウロパ氷底海探査機のプロトタイプです。当時検討していたものは、掘削後に探査機も掘削サンプルも回収できないという課題がありましたが、この掘削ドローンで解決できる可能性があります。
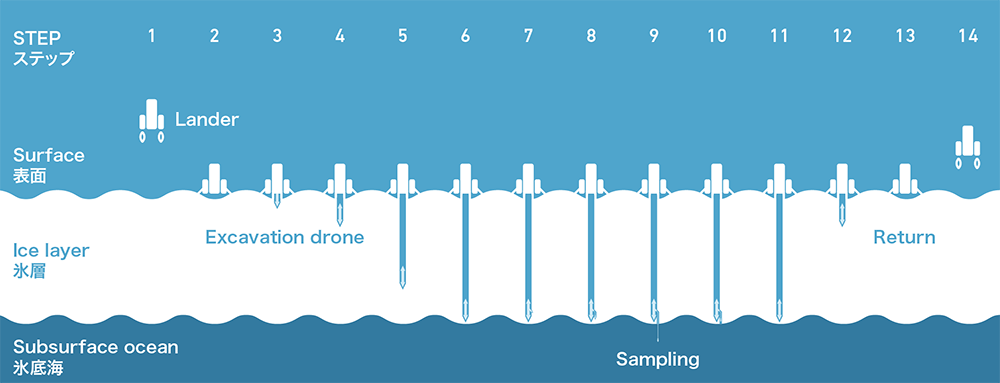
This is an image of a space exploration mission using a drilling drone. First, launch a excavation drone from a lander on an ice celestial body. After excavating the ice layer, we will take a sample and return to the lander again.
こちらは掘削ドローンを用いた宇宙探査ミッションのイメージです。氷天体上の着陸船から掘削ドローンを発進。氷層を掘削後に標本採取を行い、再び着陸船に戻ります。
This is an image of an ice celestial body that has a subsurface ocean, and the excavation drone collecting the seawater and returning.
こちらは氷天体に氷底海がある場合で、掘削ドローンが海水を採取し帰還するイメージです。
And now, various drones operating in the air and underwater have appeared. However, there was no drone for excavation.
I described the main points of its invention below.
そしてこれまで、空中や水中で運用するドローンは様々なものが登場していますが、掘削を行うドローンは存在しませんでした。
以下に、掘削ドローンの発明要点を記載します。
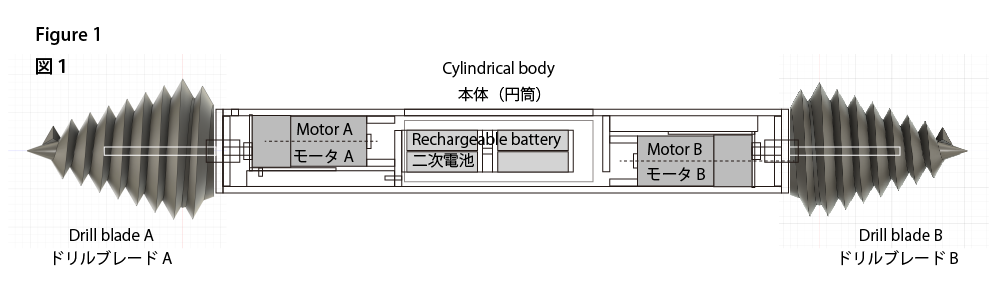
(1) Mount the motor A and drill blade A on one side of the cylindrical body, and the motor B and drill blade B on the opposite side. It has a shape with drill blades on both ends of the body. [Figure 1]
(1) 円筒状の本体の片側に、モータAとドリルブレードA、逆側にモータBとドリルブレードBを取付。本体の両端にドリルブレードが付いた形状となる。[図1]
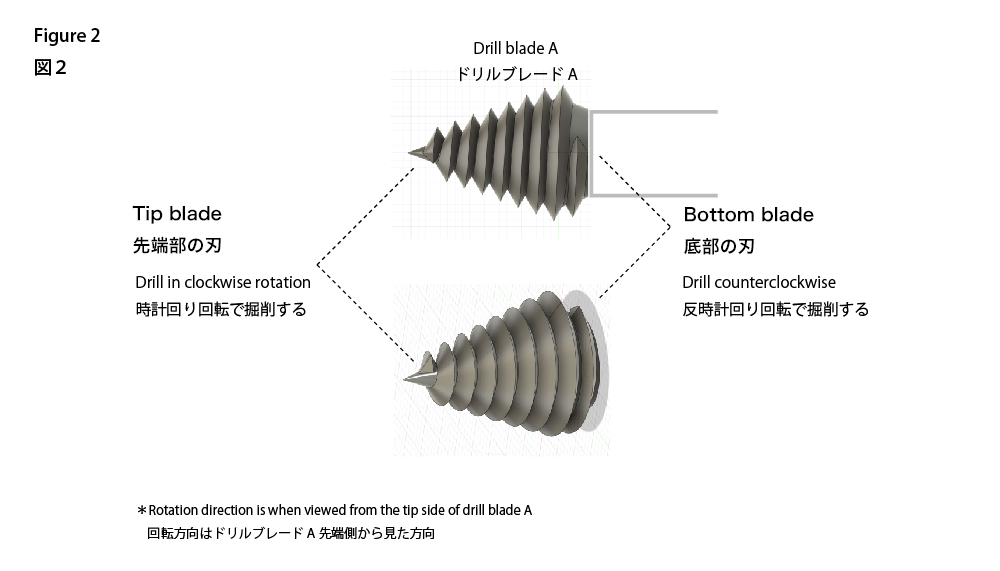
(2) Each drill blade has a spindle shape, and in addition to drilling at the tip blade, drilling at the bottom blade is also possible by reverse rotation. [Figure 2]
(2) 各ドリルブレードは紡錘形をしており、先端部の刃での掘削に加え、逆回転で底部の刃でも掘削が可能である。[図2]
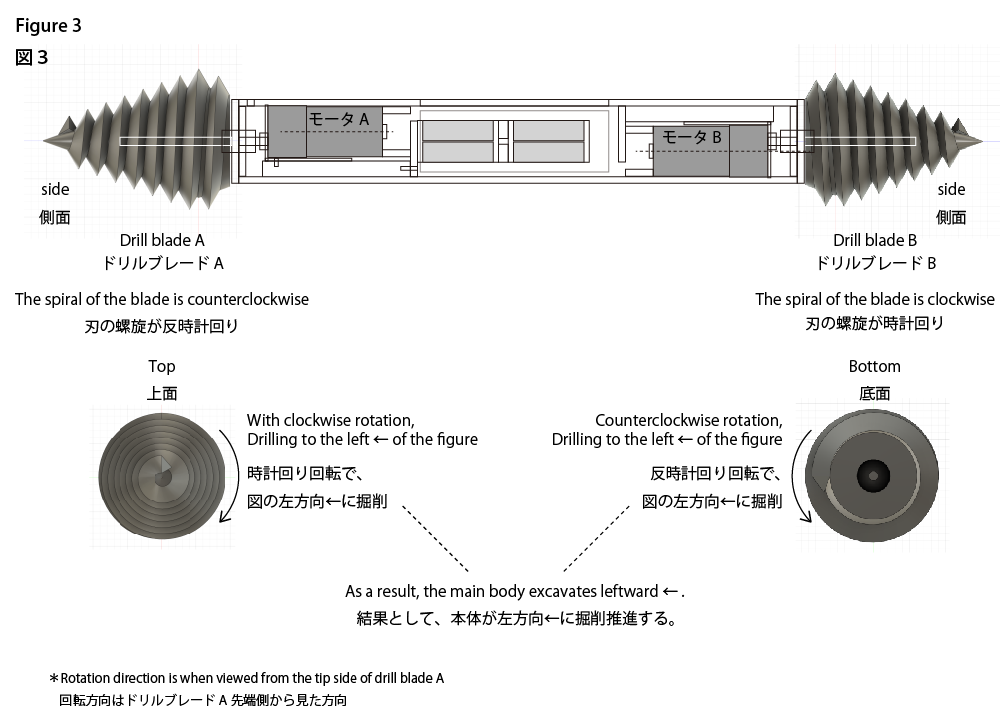
(3) The drill blade A and the drill blade B have opposite spiral directions. [Figure 3]
According to this specification, if the rotation direction of the motor B is reversed with respect to the motor A and the rotation directions of the drill blade A and the drill blade B are reversed, it is possible to excavate in one specific direction.
(3) ドリルブレードAとドリルブレードBは、刃の螺旋方向が逆である。[図3]
この仕様により、モータAに対しモータBの回転方向を逆にして、ドリルブレードAとドリルブレードBの回転方向を逆にすれば、任意の1方向への掘削が可能となる。
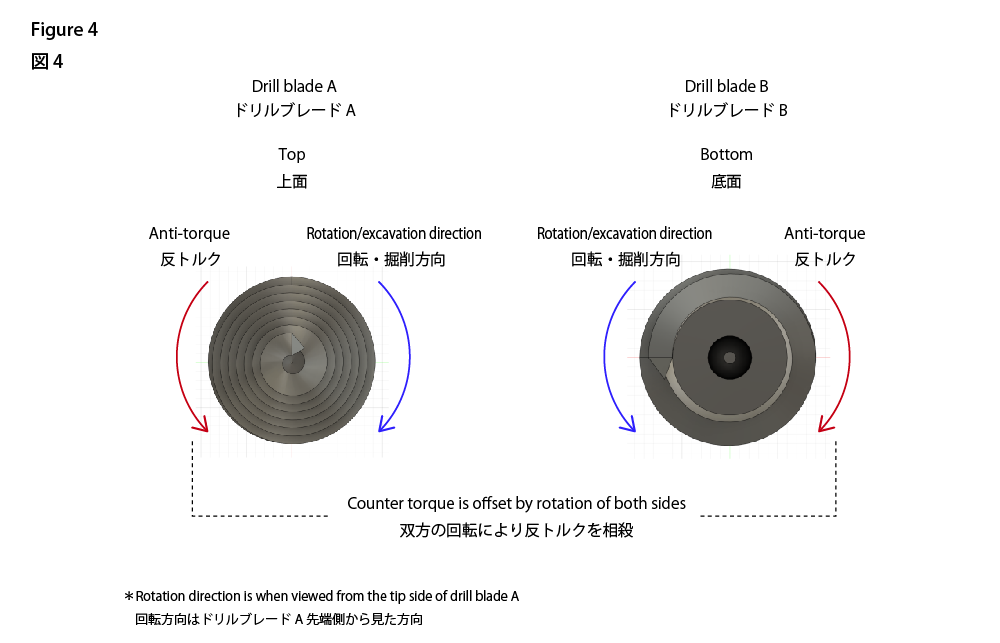
(4) The reason why the excavation described in the previous section has become possible is that the anti-torque generated by the excavation rotation is offset by reversing the rotation directions of the A and B drill blades. [Figure 4]
If this anti-torque is not offset, the body itself will rotate and excavation cannot be performed.
(4) 前項で述べた掘削が可能となったのは、AとBそれぞれのドリルブレードの回転方向を逆にして、掘削回転で生じる反トルクを相殺したからである。[図4]
この反トルクを相殺しないと、本体自体が回転してしまい、掘削は行えない。
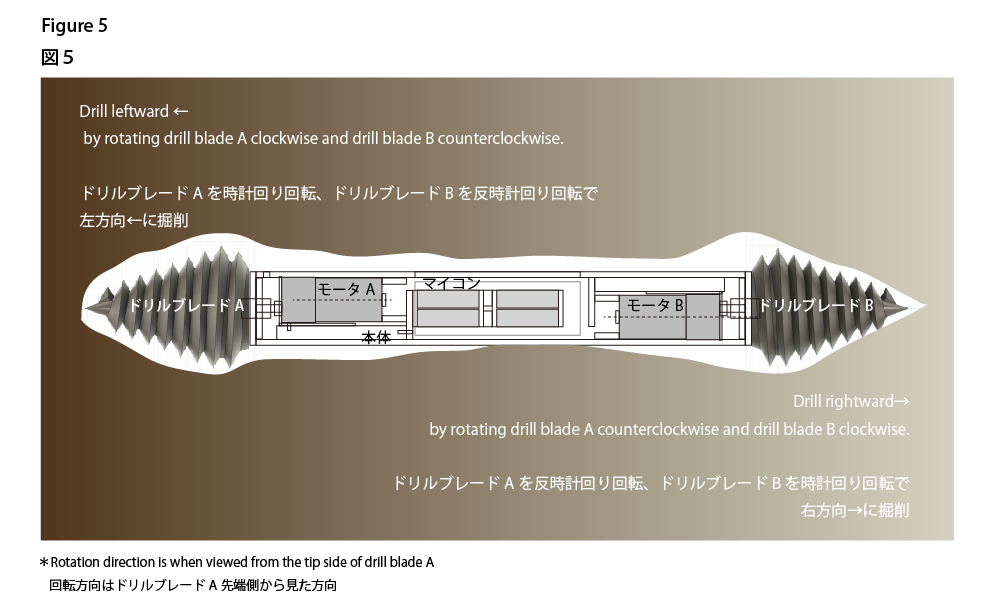
(5) The rotation directions of the motors A and B are controlled by the microcomputer.
If the excavation direction and excavation time are specified in advance by the program, it is possible to return the main body to the original excavation start point after excavating an arbitrary distance. [Figure 5]
(5) AとBそれぞれモータの回転方向は、マイコンなどのコンピュータで制御する。
予めプログラムで掘削方向と掘削時間を指定しておけば、任意の距離を掘削後、元の掘削開始地点に本体を帰還させることが可能である。[図5]
The advantages compared to the existing technologies are described below.
-Anti-torque can be offset by the action of the counter-rotating drill blade, so there is no need to fix the main body, and no columns or turrets are required compared to boring.
-The excavation drone alone allows unmanned drilling.
-By reversing the rotation direction of the motor, it is possible to excavate in the opposite direction and return autonomously.
-Since it is possible to return, sample return survey is possible.
-Compared to counter rotating drills, the structure of shaft and gear is simpler and the number of wear parts is smaller, which can reduce maintenance cost and failure risk.
既存の掘削技術等と比較した利点としては、以下を挙げられます。
・逆回転するドリルブレードの働きで反トルクを相殺できるので、本体の固定が不要になり、ボーリングと異なり支柱や櫓も必要ない。
・掘削ドローン単独で、無人で掘削が可能。
・モータの回転方向を逆にすることで逆方向への掘削でき、自律的に帰還が可能となる。
・帰還が可能であることから、サンプルリターン調査が可能である。
・二重反転ドリルと比べると、シャフトやギヤの構成がシンプルで摩耗部品も少なくなり、メンテナンスコスト低減や故障リスク低減が見込める。
The following are the photographs of the production process.
以下は制作過程の写真です。