The Probe for Europa Subsurface Ocean (2019-2020)
Jupiter’s second moon Europa is covered with thick ice. On the other hand, there is a liquid sea under the ice, and the possibility of the existence of extraterrestrial life is also discussed.
Currently, Shibusawa Rocket is working on a prototype for a probe that investigates the subsurface ocean on Europa. Even though there are many challenges in the realization of this probe and mission, we’d like to draw one of the future visions of human deep space exploration.
I displayed this prototype at Maker Fare Tokyo in August 3rd and 4th, 2019. Additionally, I displayed modified version at Tsukuba Mini Maker Faire 2020 in February 15th and 16th, 2020.
木星の第二衛星エウロパは表面が厚い氷で覆われている一方、氷の下には液体の海、すなわち氷底海が存在するとされ、地球外生命体が存在する可能性も議論されています。
Shibusawa Rocketでは、エウロパ氷底海という人類にとって未知の領域に挑む探査機を構想中で、現在プロトタイプを制作中です。探査機とミッションの実現には多くの難題がありますが、私は人類の深宇宙探査の未来像のひとつを描きたいと考えています。
本プロトタイプは、Maker Faire Tokyo 2019 (8/3~8/4)、そして改良を行ったVersionをつくば市で開催されたTsukuba Mini Maker Faire 2020(2/15~2/16)にて展示・実演しました。
Movie/動画
Image to carry out the exploration mission.
探査ミッションの遂行イメージ。
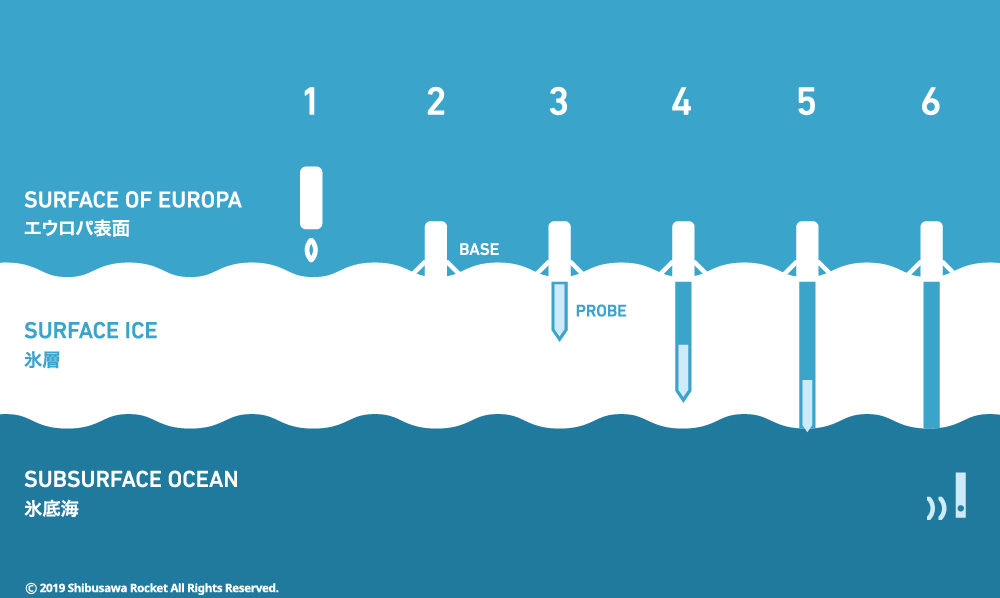
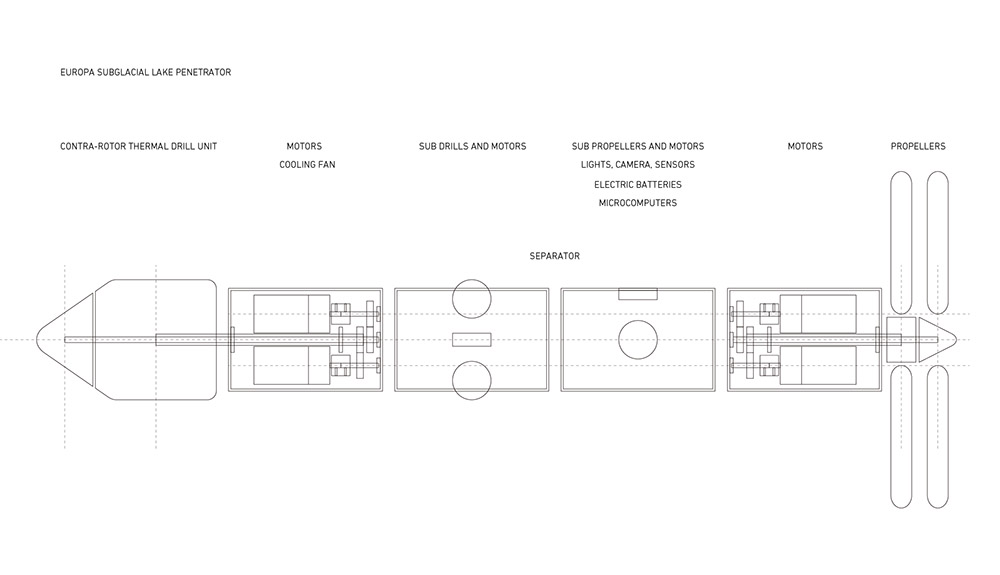
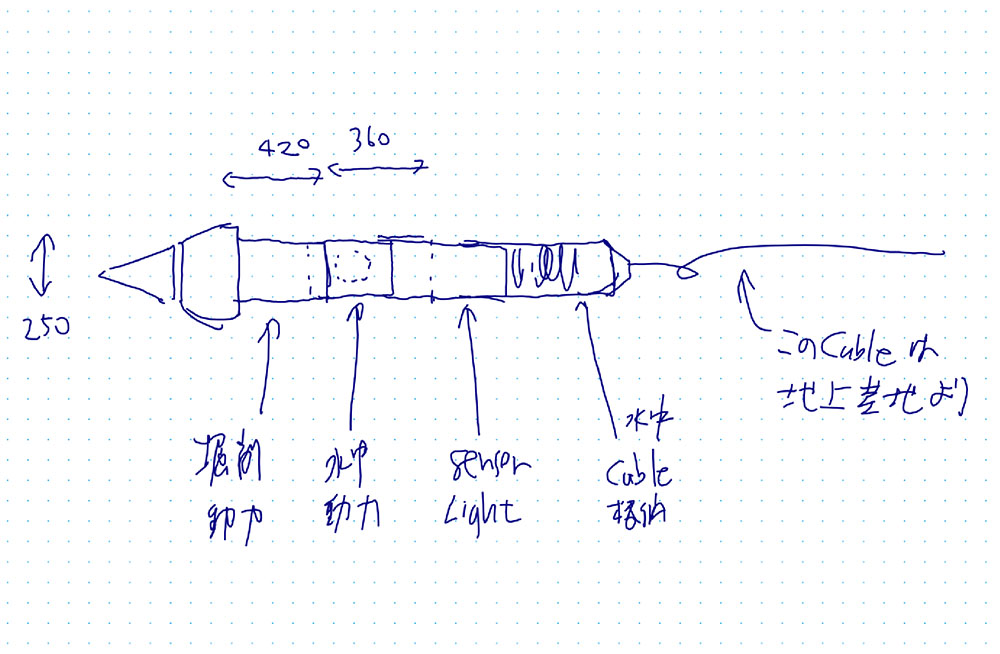
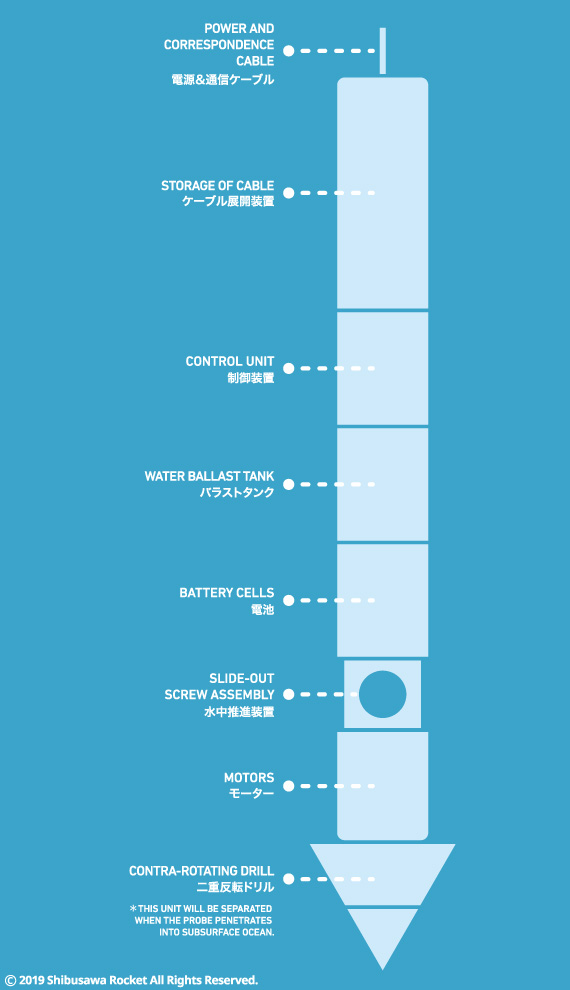
The probe is a buried ice digging robot, and equipped with a contra-rotating drill for ice layers of several tens of kilometers in thickness penetrating, and a four-way screw assembly for moving in the water after reaching the subsurface ocean.
本探査機は埋没型氷掘削潜水探査ロボットで、厚さ数十キロに及ぶと思われる氷層を掘削推進するための二重反転ドリルや、氷底海到達後に海中を移動するための、四方向推進器などを装備します。
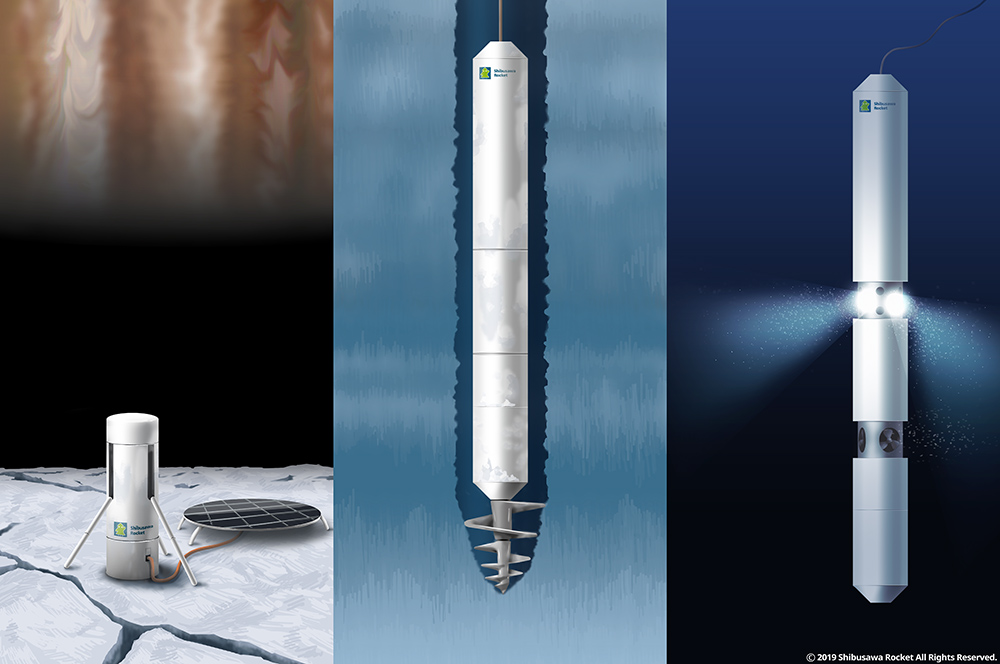
This is a concept art depicting the mission.
The picture on the left is an unmanned station on the surface of Europa, which houses the probe inside, and also includes devices that supply power. The circular black plate is a device that generates electricity from radiation from Jupiter.
The picture in the middle is the probe that excavates in the surface and moves toward the ice bottom sea. In fact, the hole is filled with the ice that was excavated.
The picture on the right is a probe under the sea bottom. While floating vertically, explore the object with sonar, and record with LED light and camera. In addition, a unit will be installed to check the presence of seawater components and organisms.
こちらはミッションを伝えるために描いたコンセプトアートです。
左の絵はエウロパ表面の探査ベースで、内部には探査機が格納されているほか、電源供給を行う装置などが含まれます。円形の黒い板は、木星からの放射線で発電する装置です。
中央の絵は表層内を掘削し氷底海を目指して進む探査機です。実際には掘削した氷により、穴は埋まってゆきます。
右の絵は氷底海中を潜航する探査機です。茶柱のように浮遊しながらソナーで物体を探査し、LEDライトとカメラで記録を行います。水質や生物の有無の検査を行うユニットも搭載します。
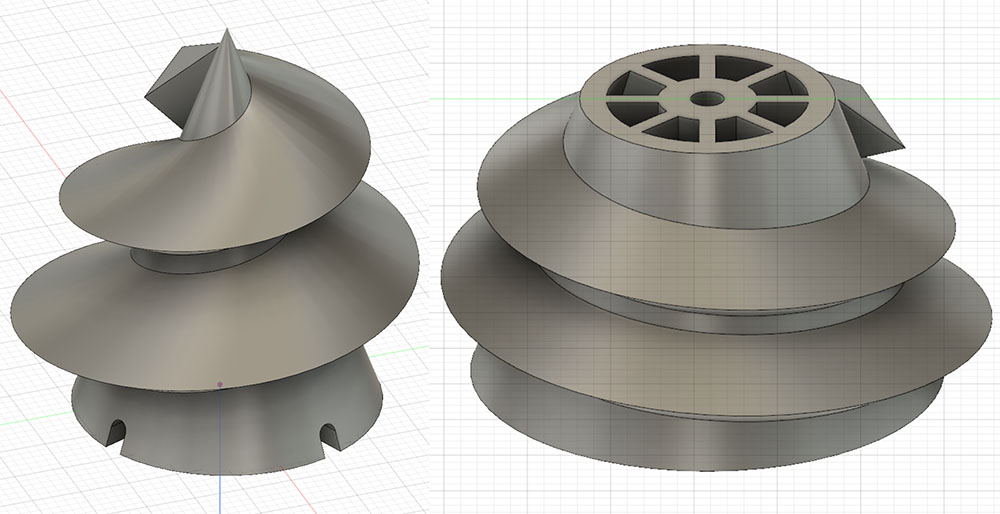
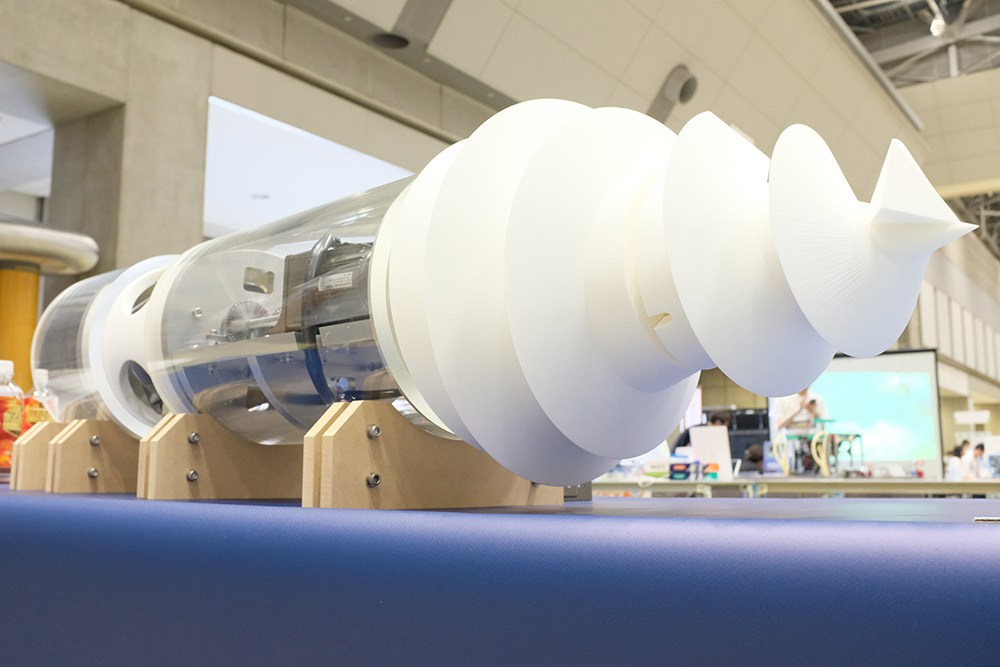
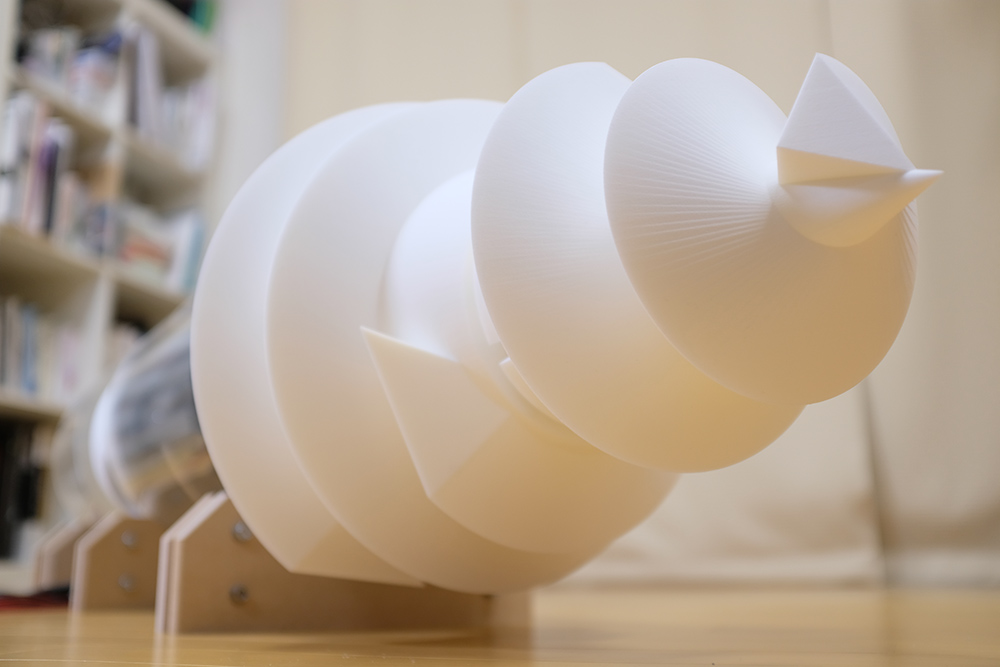
Contra-rotating drill. If rotation is only in one direction, the body of the probe will also rotate, and drilling will not be possible, so the torque will be offset by the contra-rotating drill.
The drill blade is a 3D-printed output (nylon) as it is prototyped now.
二重反転ドリル。1方向の回転のみですと探査機本体も回転し掘削できませんので、二重回転ドリルでトルクを相殺します。試作の為、ドリルブレードは3Dプリントによる出力(ナイロン)です。
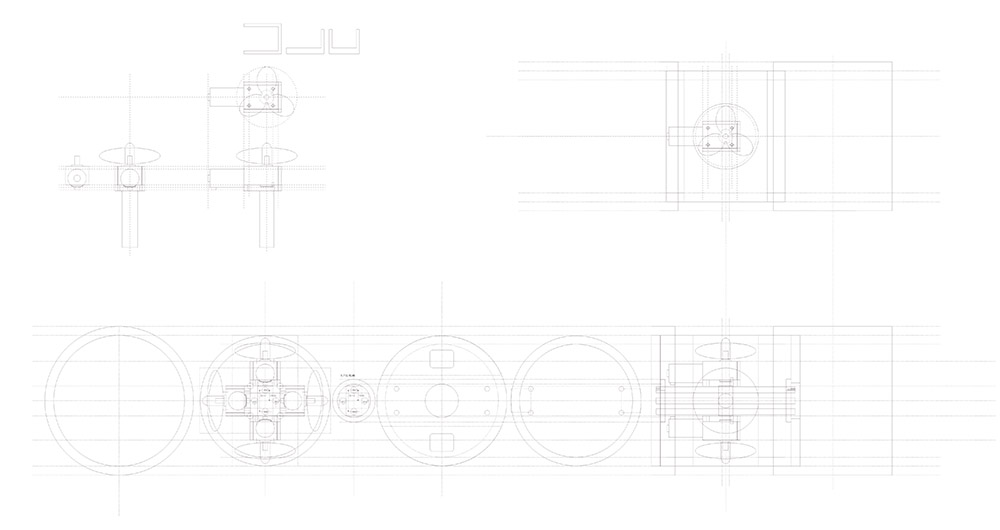
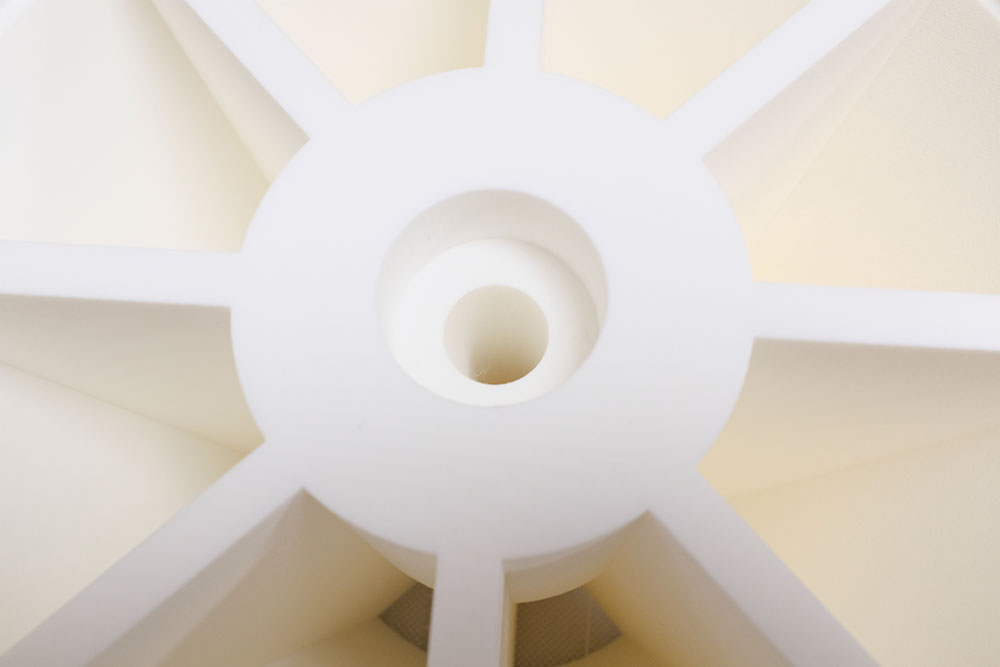
Four-way screw assembly in the subsurface ocean. When reaching the sea, slide the shell to expose the unit to the sea. The shell and screw are 3D printed output, but the structural material of the round plate is duralumin.
水中推進ユニット。氷底海到達時、外殻をスライドさせてユニットを海中に露出させます。外殻とスクリューは3Dプリント出力ですが、丸板の構造材はジュラルミンです。

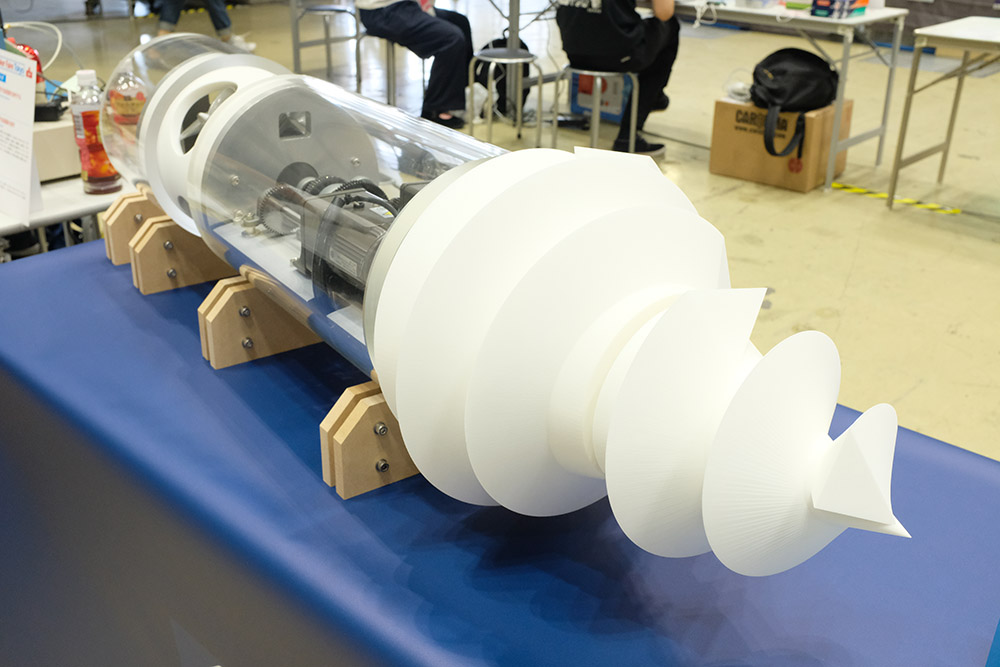
Screw. It was painted on what had been 3D printed.
スクリュー。3Dプリントしたものに塗装しています。

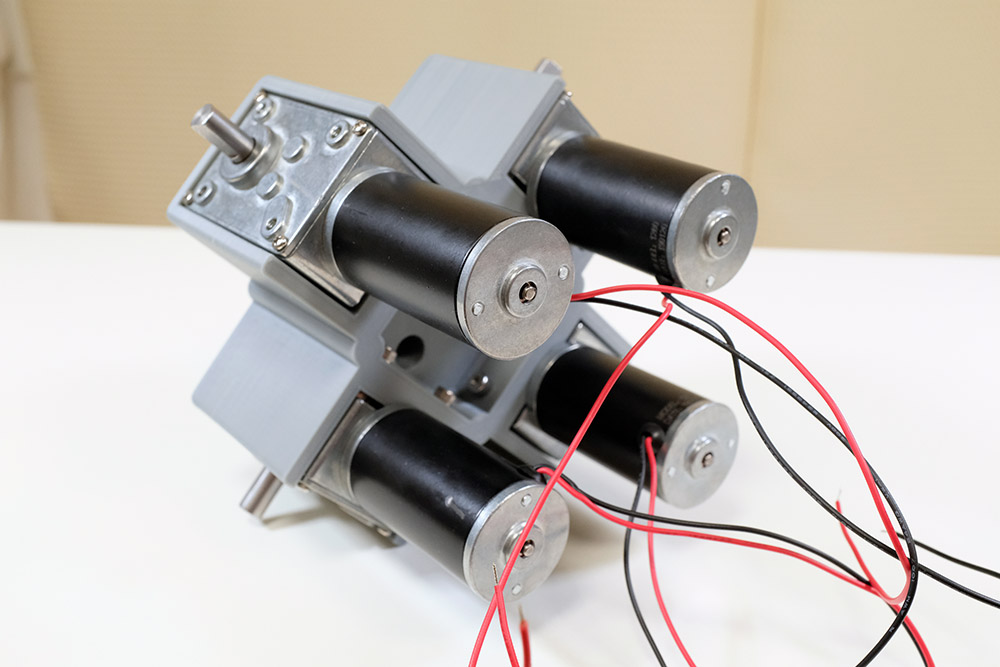
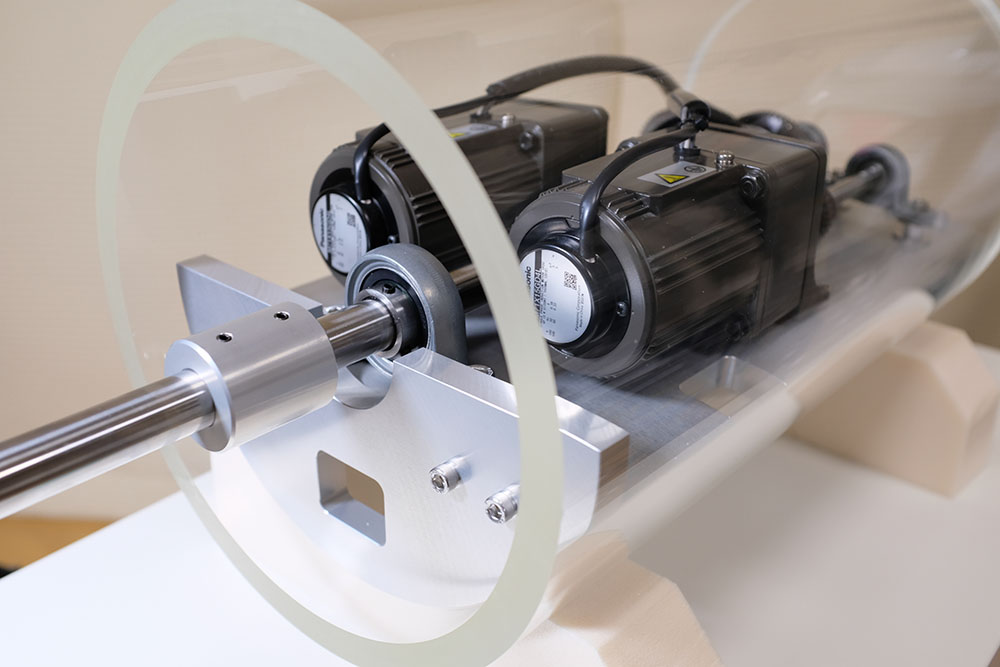
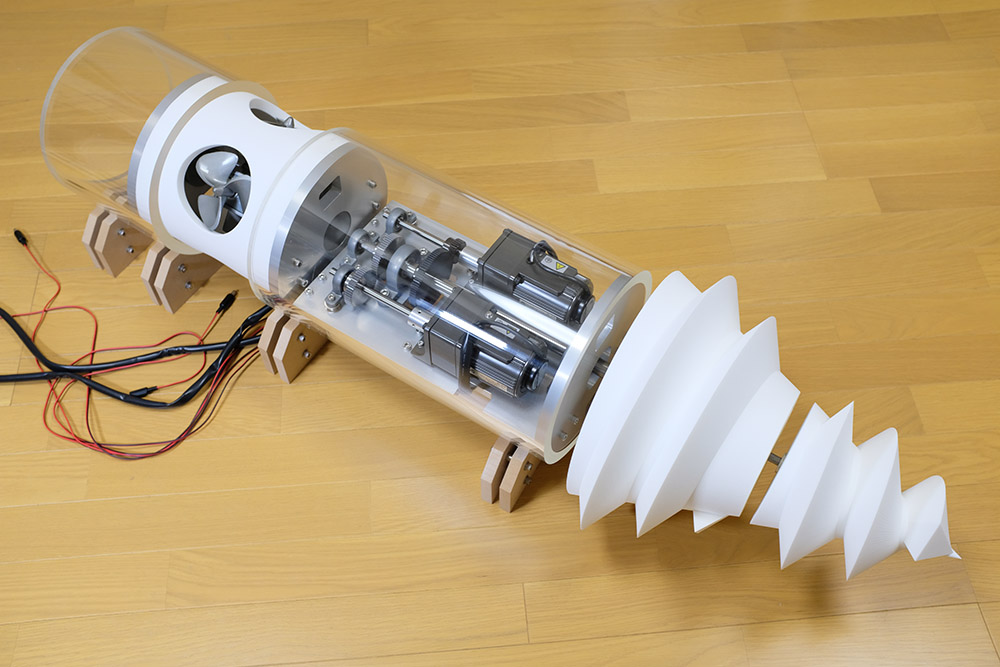
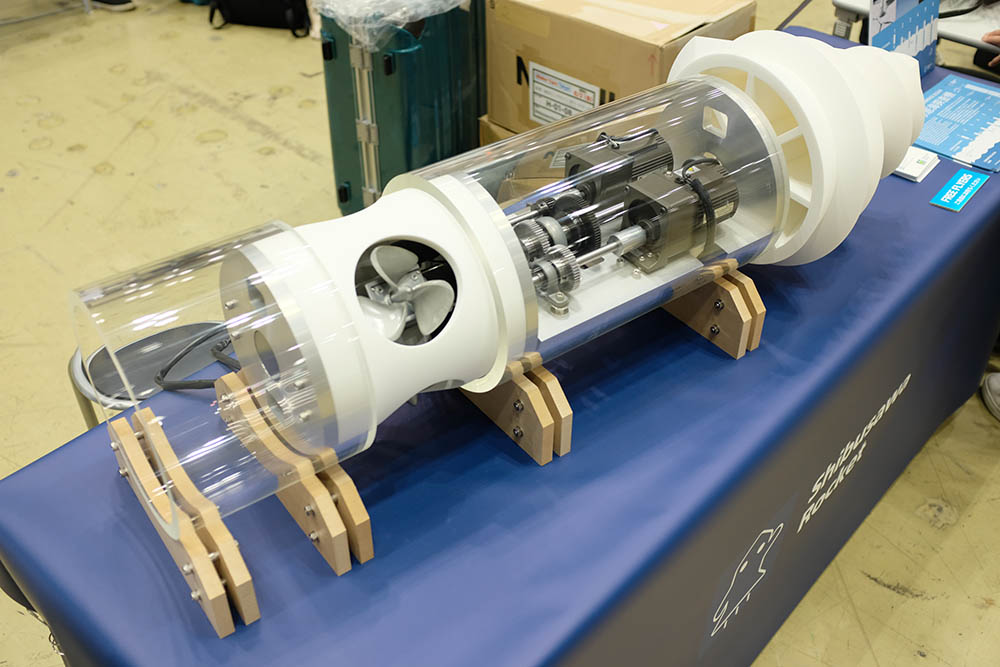
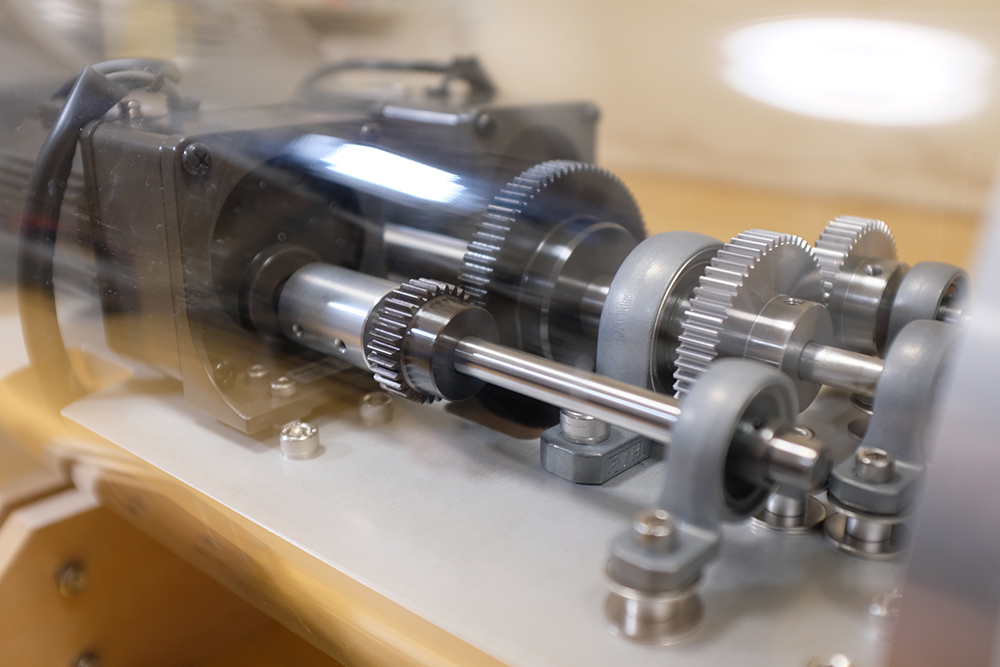
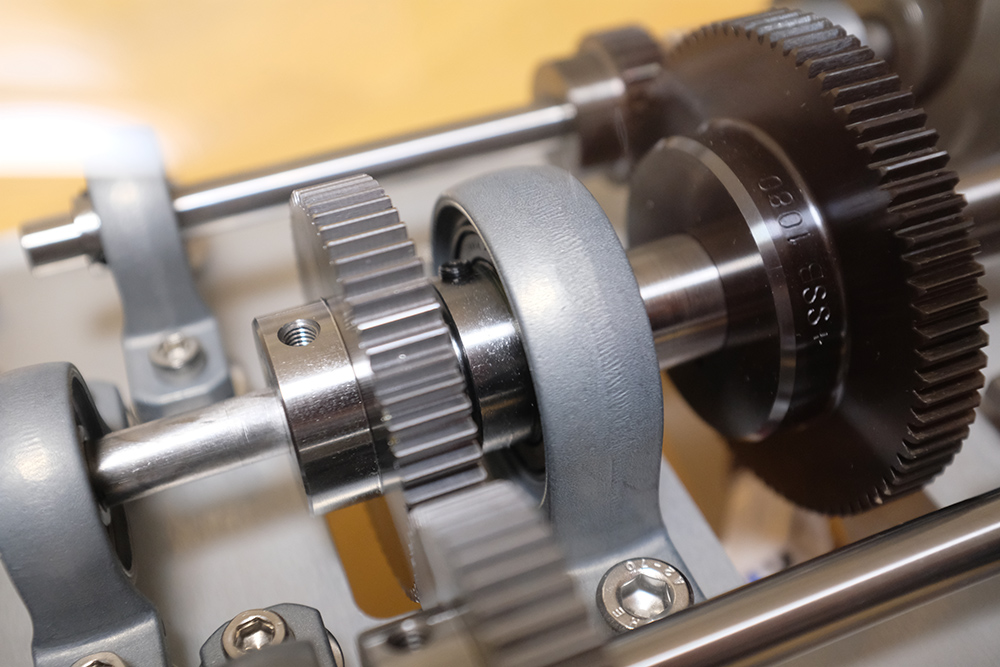
Motors and gears to drive the contra-rotating drill. This prototype uses two AC motors. Structural material is 15mm thick duralumin to fasten important parts. The outer shell uses a 15mm thick transparent acrylic for display.
ドリルを駆動するモーターとギヤ。本プロトタイプではACモーター2個を使用しています。これら重要な部品を固定するための構造材は、厚さ15mmのジュラルミンです。外殻は展示の為、厚さ15mmの透明なアクリルを使用しています。
There are many challenges to be solved in order to realize this probe and plan.
For example:
– Transport to Jupiter
– Protection of Jupiter from strong radiation and magnetic fields
– Durability to high pressure in the ice layer and the sea
– Power generation and supply
– AI, Control, Communication in Extreme Environment
However, by solving these, it can be applied to the exploration of ice objects such as Saturn’s satellite Enceladus and many comets that exist in the outer edge of the solar system.
Furthermore, it can be used not only for deep space exploration but also for the earth, as well as for surveys of lakes such as Lake Vostok in Antarctica.
この探査機とミッションの実現には、
・木星までの輸送手段
・木星の強い放射線と磁場からの保護
・エウロパ氷層と海中の高圧力への耐久性
・発電および電力供給
・極限環境でのAI、制御、通信
など、クリアすべき難題も多いです。
一方でこれらを解決できれば、土星の衛星エンケラドスや、太陽系外縁部に多数存在する彗星など氷天体探査に応用可能です。
加えて、深宇宙探査だけでなく地球上においても、南極のヴォストーク湖などの氷底湖調査に活用できます。
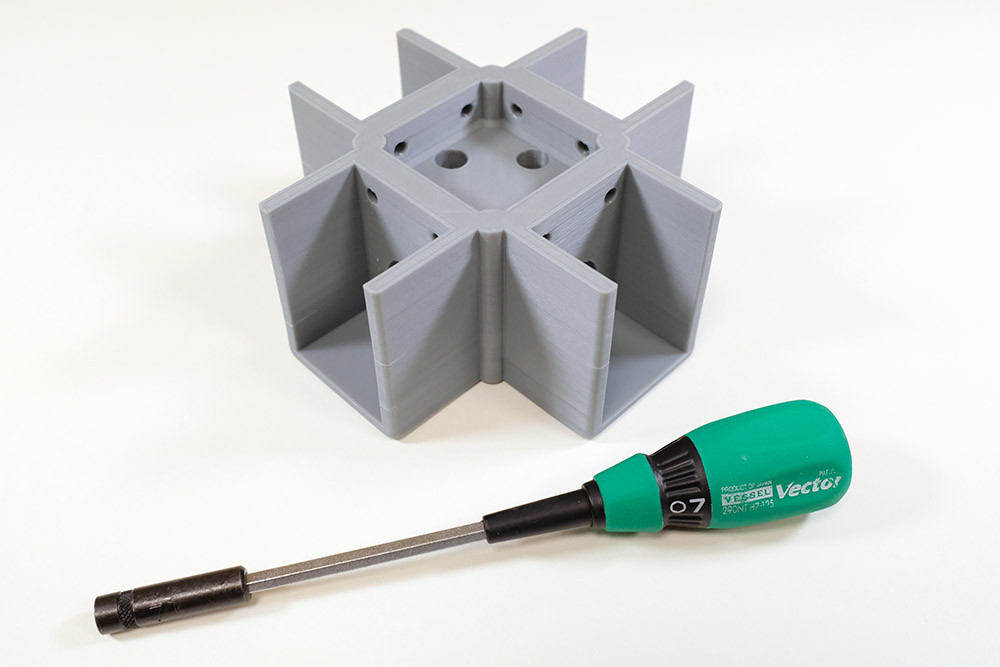
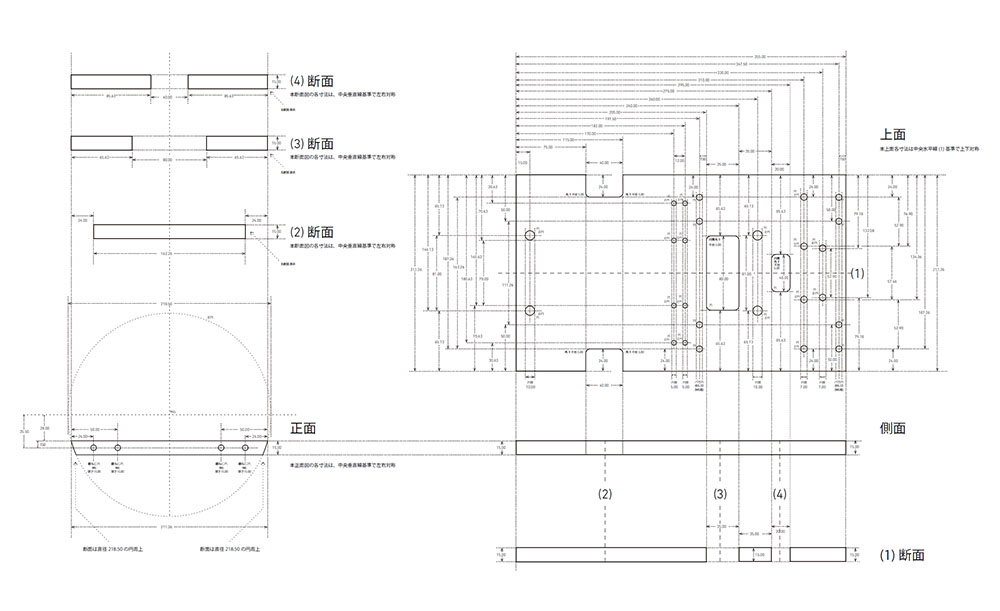
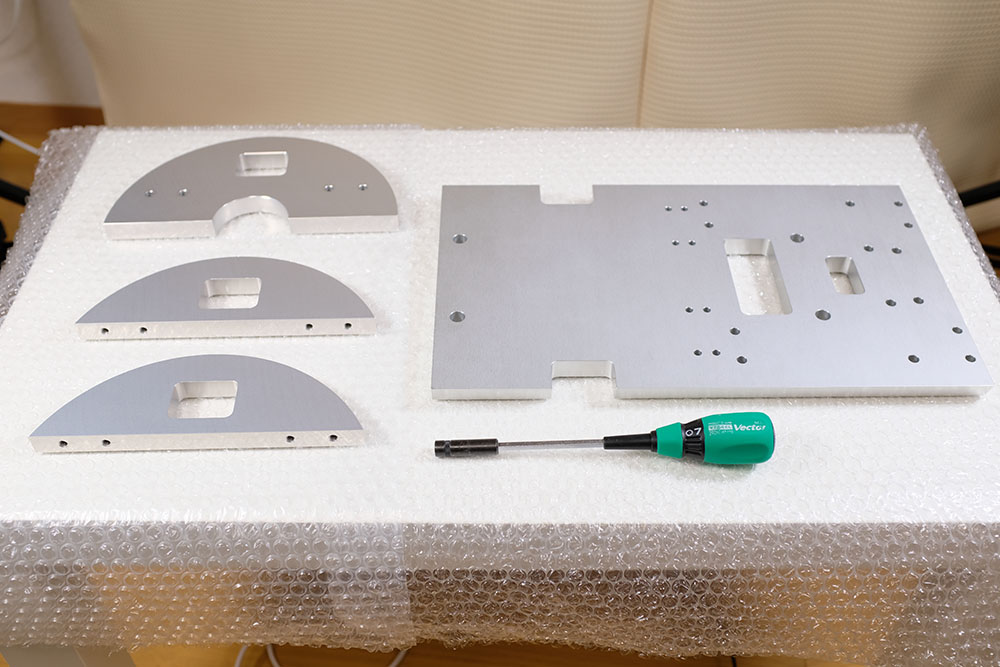
The following are the photographs of the production process.
以下は制作過程の写真です。